တိကျသော Servo DC မော်တာ 46S/12V-8A1

servo DC မော်တာ၏ အခြေခံအင်္ဂါရပ်များ- (အခြားမော်ဒယ်များ၊ စွမ်းဆောင်ရည်ကို စိတ်ကြိုက်ပြင်ဆင်နိုင်သည်)
| 1. အဆင့်သတ်မှတ်ဗို့အား: | DC 12V | 5. အဆင့်သတ်မှတ်ထားသော မြန်နှုန်း- | ≥ 2600 rpm |
| 2.လည်ပတ်ဗို့အားအကွာအဝေး: | DC 7.4V-13V | 6. လက်ရှိပိတ်ဆို့ခြင်း | ≤2.5A |
| 3. အဆင့်သတ်မှတ်ပါဝါ | 25W | 7. လက်ရှိ Load : | ≥1A |
| 4. လှည့်ခြင်း ဦးတည်ချက် | CW output shaft သည် အထက်တွင်ရှိသည်။ | 8. Shaft clearance : | ≤1.0mm |
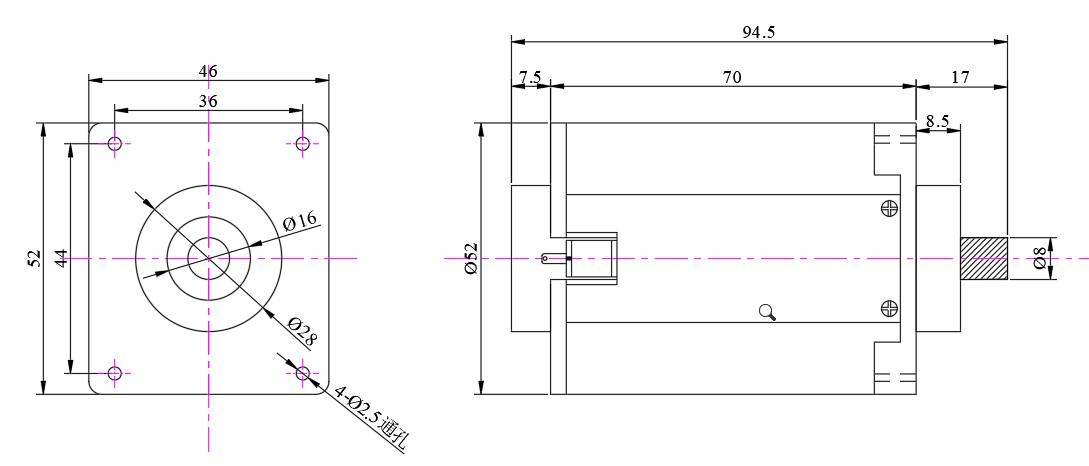
ထုတ်ကုန် အသွင်အပြင် ပုံကြမ်း
သက်တမ်းကုန်ဆုံးချိန်
ထုတ်လုပ်သည့်နေ့မှစ၍၊ ထုတ်ကုန်၏ဘေးကင်းသောအသုံးပြုမှုကာလသည် 10 နှစ်ဖြစ်ပြီး ဆက်တိုက်အလုပ်လုပ်ချိန်သည် ≥ 2000 နာရီဖြစ်သည်။
ထုတ်ကုန်အင်္ဂါရပ်များ
1. ကျစ်ကျစ်လစ်လစ်၊ နေရာချွေတာသော ဒီဇိုင်း
2.Ball bearing ဖွဲ့စည်းပုံ;
3. Brush ၏ တာရှည်ခံမှု ၊
4. စုတ်တံများကို ပြင်ပမှဝင်ရောက်အသုံးပြုခြင်းသည် မော်တာသက်တမ်းကို ပိုမိုရှည်ကြာစေရန် လွယ်ကူစွာ အစားထိုးလဲလှယ်နိုင်စေပါသည်။
5. High start torque;
6. ပိုမိုမြန်ဆန်စွာရပ်တန့်ရန် Dynamic ဘရိတ်ဖမ်းခြင်း၊
7. နောက်ပြန်လှည့်လှည့်ခြင်း
8. ရိုးရှင်းသောနှစ်ကြိုးချိတ်ဆက်မှု;
9.Class F လျှပ်ကာ၊ မြင့်မားသောအပူချိန်ဂဟေဆော်သည့် ကွန်မြူတာစနစ်။
10. ဆူညံသံနည်းပါးပြီး တည်ငြိမ်သောလည်ပတ်မှုနှင့်အတူ၊ ၎င်းသည် မြန်နှုန်းမြင့်ပြီး ဆူညံသံနည်းပါးသောအချိန်အခါများတွင် အထူးသင့်လျော်သည်။
လျှောက်လွှာများ
စမတ်အိမ်၊ တိကျသောဆေးဘက်ဆိုင်ရာကိရိယာများ၊ မော်တော်ကားဒရိုက်၊ လူသုံးအီလက်ထရွန်နစ်ပစ္စည်းများ၊ အနှိပ်ခန်းနှင့် ကျန်းမာရေးစောင့်ရှောက်မှုကိရိယာများ၊ ပုဂ္ဂိုလ်ရေးစောင့်ရှောက်မှုကိရိယာများ၊ အသိဉာဏ်ရှိသော စက်ရုပ်ဂီယာများ၊ စက်မှုအလိုအလျောက်စနစ်၊ အလိုအလျောက်စက်ကိရိယာများ၊ ဒစ်ဂျစ်တယ်ထုတ်ကုန်များ စသည်တို့တွင် တွင်ကျယ်စွာအသုံးပြုပါသည်။
စွမ်းဆောင်ရည် သရုပ်ဖော်ပုံ



DC servo motor ၏ထူးခြားချက်များကားအဘယ်နည်း
DC servo motor တွင် positive နှင့် negative terminals များပါရှိသော direct current (DC) ရှိပါသည်။ဤ terminals တစ်ခုစီကြားတွင်၊ လက်ရှိ စီးဆင်းမှုသည် တူညီသော ဦးတည်ချက်ဖြစ်သည်။တိကျမှုနှင့် တိကျမှုအတွက် servo motor ၏ inertia သည် သေးငယ်သင့်သည်။DC servos များသည် မြင့်မားသော torque-to-weight ratio ကို ထိန်းသိမ်းထားခြင်းဖြင့် ရရှိသည့် လျင်မြန်သောတုံ့ပြန်မှုရှိသည်။ထို့အပြင် DC servo ၏အမြန်နှုန်းသည် linear ဖြစ်သင့်သည်။
DC servo motor ဖြင့်၊ လက်ရှိထိန်းချုပ်မှုသည် AC servo motor ထက် များစွာရိုးရှင်းသောကြောင့် ထိန်းချုပ်မှုလိုအပ်ချက်မှာ လက်ရှိ armature ပမာဏဖြစ်သည်။မော်တာအမြန်နှုန်းကို duty cycle controlled pulse width modulation (PWM) ဖြင့် ထိန်းချုပ်ထားသည်။ထိန်းချုပ်မှု flux ကို torque စီမံခန့်ခွဲရန် အသုံးပြုပြီး လုပ်ဆောင်ချက် လည်ပတ်မှုတစ်ခုစီတိုင်းတွင် ယုံကြည်စိတ်ချရသော ညီညွတ်မှုကို ဖြစ်ပေါ်စေသည်။
DC servo motor များသည် squirrel-cage AC motors များထက် inertia ပိုများသည်။၎င်းနှင့် ပွတ်တိုက်မှု ခံနိုင်ရည် တိုးလာခြင်းသည် တူရိယာ ဆာဗာများတွင် ၎င်းတို့၏ အသုံးပြုမှုကို ဟန့်တားသည့် အဓိက အကြောင်းရင်းများ ဖြစ်သည်။သေးငယ်သောအရွယ်အစားများတွင် DC servo မော်တာကို အဓိကအားဖြင့် လေယာဉ်ထိန်းချုပ်မှုစနစ်များတွင် အဓိကအသုံးပြုကြပြီး အလေးချိန်နှင့် နေရာကန့်သတ်ချက်များကြောင့် မော်တာသည် ယူနစ်တစ်ခုအတွက် အမြင့်ဆုံးပါဝါကို ပေးဆောင်ရန် လိုအပ်ပါသည်။ပုံမှန်အားဖြင့် ၎င်းတို့အား အဆက်မပြတ် တာဝန်ထမ်းဆောင်ရန် သို့မဟုတ် ပုံမှန်မဟုတ်သော မြင့်မားသော စတင် torque လိုအပ်သည့်နေရာတွင် အသုံးပြုသည်။DC servo မော်တာများကို လျှပ်စစ်ဓာတ်အားသွင်းစက်များ၊ လုပ်ငန်းစဉ်ထိန်းချုပ်ကိရိယာများ၊ ပရိုဂရမ်းမင်းကိရိယာများ၊ စက်မှုအလိုအလျောက်စနစ်သုံး စက်ရုပ်များ၊ CNC စက်ကိရိယာပစ္စည်းများနှင့် အလားတူသဘောတူသော အခြားအပလီကေးရှင်းများစွာတွင်လည်း အသုံးပြုနိုင်ပါသည်။
DC servo motor သည် အဓိက အစိတ်အပိုင်းလေးခုဖြစ်သည့် DC motor၊ position sensing device၊ gear assembly နှင့် control circuit တို့ ပါဝင်သည့် စည်းဝေးပွဲတစ်ခုဖြစ်သည်။DC မော်တာ၏ လိုအပ်သော အမြန်နှုန်းသည် အသုံးပြုသည့် ဗို့အားပေါ်တွင် မူတည်သည်။မော်တာအမြန်နှုန်းကို ထိန်းချုပ်ရန်၊ potentiometer သည် error amplifier ၏ inputs များထဲမှ တစ်ခုသို့ သက်ရောက်သည့် ဗို့အားကိုထုတ်ပေးပါသည်။







