တိကျသော Servo DC မော်တာ 46S/185-8A

servo DC မော်တာ၏ အခြေခံအင်္ဂါရပ်များ- (အခြားမော်ဒယ်များ၊ စွမ်းဆောင်ရည်ကို စိတ်ကြိုက်ပြင်ဆင်နိုင်သည်)
| 1. အဆင့်သတ်မှတ်ဗို့အား: | DC 7.4V | 5. အဆင့်သတ်မှတ်ထားသော မြန်နှုန်း- | ≥ 2600 rpm |
| 2.လည်ပတ်ဗို့အားအကွာအဝေး: | DC 7.4V-13V | 6. လက်ရှိပိတ်ဆို့ခြင်း | ≤2.5A |
| 3. အဆင့်သတ်မှတ်ပါဝါ | 25W | 7. လက်ရှိ Load : | ≥1A |
| 4. လှည့်ခြင်း ဦးတည်ချက် | CW output shaft သည် အထက်တွင်ရှိသည်။ | 8. Shaft clearance : | ≤1.0mm |
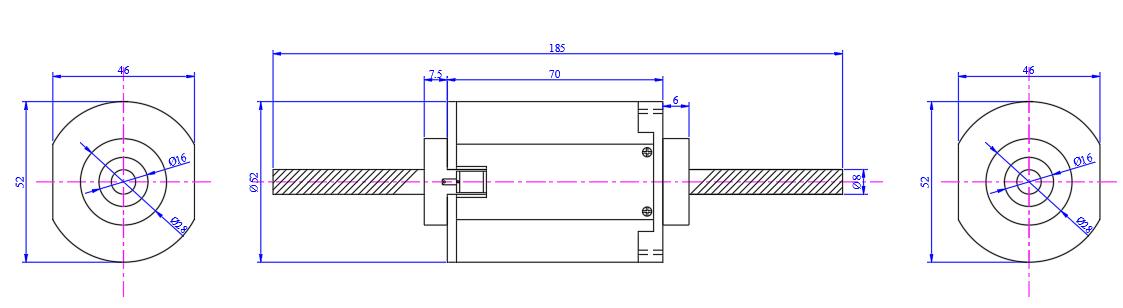
ထုတ်ကုန် အသွင်အပြင် ပုံကြမ်း
သက်တမ်းကုန်ဆုံးချိန်
ထုတ်လုပ်သည့်နေ့မှစ၍၊ ထုတ်ကုန်၏ဘေးကင်းသောအသုံးပြုမှုကာလသည် 10 နှစ်ဖြစ်ပြီး ဆက်တိုက်အလုပ်လုပ်ချိန်သည် ≥ 2000 နာရီဖြစ်သည်။
ထုတ်ကုန်အင်္ဂါရပ်များ
1. ကျစ်လစ်သော၊ နေရာချွေတာသော ဒီဇိုင်း၊
2.Ball bearing ဖွဲ့စည်းပုံ;
3. ကြာရှည်သောဝန်ဆောင်မှုသက်တမ်း;
4. စုတ်တံများကို ပြင်ပမှဝင်ရောက်အသုံးပြုခြင်းသည် မော်တာသက်တမ်းကို ပိုမိုရှည်ကြာစေရန် လွယ်ကူစွာ အစားထိုးလဲလှယ်နိုင်စေပါသည်။
5.High starting torque;
6. ပိုမိုမြန်ဆန်စွာရပ်တန့်ရန် ဒိုင်းနမစ်ဘရိတ်ဖမ်းခြင်း၊
7. နောက်ပြန်လှည့်နိုင်သောလည်ပတ်မှု;
8.Simple two-wire connection;
9.Class F လျှပ်ကာ၊ မြင့်မားသောအပူချိန်ဂဟေဆော်သည့် ကွန်မြူတာစနစ်။
10.High performance, high cost performance and low interference.
လျှောက်လွှာများ
စမတ်အိမ်၊ တိကျသောဆေးဘက်ဆိုင်ရာကိရိယာများ၊ မော်တော်ကားဒရိုက်၊ လူသုံးအီလက်ထရွန်နစ်ပစ္စည်းများ၊ အနှိပ်ခန်းနှင့် ကျန်းမာရေးစောင့်ရှောက်မှုကိရိယာများ၊ ပုဂ္ဂိုလ်ရေးစောင့်ရှောက်မှုကိရိယာများ၊ အသိဉာဏ်ရှိသော စက်ရုပ်ဂီယာများ၊ စက်မှုအလိုအလျောက်စနစ်၊ အလိုအလျောက်စက်ကိရိယာများ၊ ဒစ်ဂျစ်တယ်ထုတ်ကုန်များ စသည်တို့တွင် တွင်ကျယ်စွာအသုံးပြုပါသည်။
စွမ်းဆောင်ရည် သရုပ်ဖော်ပုံ



Servo စနစ်- ၎င်းသည် အရာဝတ္တုတစ်ခု၏ အနေအထား၊ တိမ်းညွှတ်မှုနှင့် အခြေအနေကဲ့သို့သော အထွက်ထိန်းချုပ်ထားသော ပမာဏများကို ထည့်သွင်းရန် ပစ်မှတ် (သို့မဟုတ် ပေးထားသောတန်ဖိုး) တွင် ပြောင်းလဲမှုတိုင်းကို လိုက်လျှောက်နိုင်အောင် လုပ်ဆောင်ပေးသည့် အလိုအလျောက်ထိန်းချုပ်မှုစနစ်တစ်ခုဖြစ်သည်။servo ၏အဓိကတာဝန်မှာ control command ၏လိုအပ်ချက်များနှင့်အညီပါဝါကိုချဲ့ထွင်ရန်၊ အသွင်ပြောင်းရန်နှင့်ထိန်းညှိရန်ဖြစ်သည်၊ သို့မှသာ drive device မှ torque၊ speed နှင့် position output ကိုအလွန်ပြောင်းလွယ်ပြင်လွယ်နှင့်အဆင်ပြေစွာထိန်းချုပ်နိုင်သည်။
၎င်း၏ "servo" စွမ်းဆောင်ရည်ကြောင့်၎င်းကို servo motor ဟုခေါ်သည်။၎င်း၏လုပ်ဆောင်ချက်မှာ ထိန်းချုပ်အရာဝတ္တုကို မောင်းနှင်ရန်အတွက် အဝင်ဗို့အားထိန်းချုပ်မှုအချက်ပြမှုကို အထွက် ထောင့်ရွေ့ပြောင်းခြင်းနှင့် ထိန်းချုပ်မှုအရာဝတ္တုကိုမောင်းနှင်ရန်အတွက် shaft ရှိ angular displacement နှင့် angular velocity အဖြစ်သို့ပြောင်းလဲရန်ဖြစ်သည်။
DC Servo Motor ၏မူလ
DC servo motor ၏ လုပ်ဆောင်မှု နိယာမသည် အခြေခံအားဖြင့် သာမန် DC motor နှင့် အတူတူပင် ဖြစ်သည်။servo motor ကိုလှည့်စေရန်အတွက် electromagnetic torque ကို armature airflow နှင့် air gap magnetic flux တို့မှ ထုတ်ပေးပါသည်။အများအားဖြင့်၊ လှုံ့ဆော်မှုဗို့အားကို အဆက်မပြတ်ထိန်းထားရင်း ဗို့အားပြောင်းလဲခြင်းဖြင့် အမြန်နှုန်းကိုပြောင်းလဲရန် armature control method ကိုအသုံးပြုသည်။ဗို့အားငယ်လေ၊ အမြန်နှုန်းနိမ့်လေ၊ ဗို့အား သုညဖြစ်သောအခါ၊ ၎င်းသည် လည်ပတ်မှု ရပ်သွားပါသည်။အဘယ်ကြောင့်ဆိုသော် ဗို့အားသည် သုညဖြစ်သောအခါ၊ လျှပ်စီးကြောင်းမှာလည်း သုညဖြစ်သောကြောင့် မော်တာသည် လျှပ်စစ်သံလိုက် torque ကို မထုတ်ပေးဘဲ၊ ၎င်းသည် အလိုအလျောက်လှည့်ခြင်း၏ ဖြစ်စဉ်လည်း ပေါ်လာမည်မဟုတ်ပါ။







